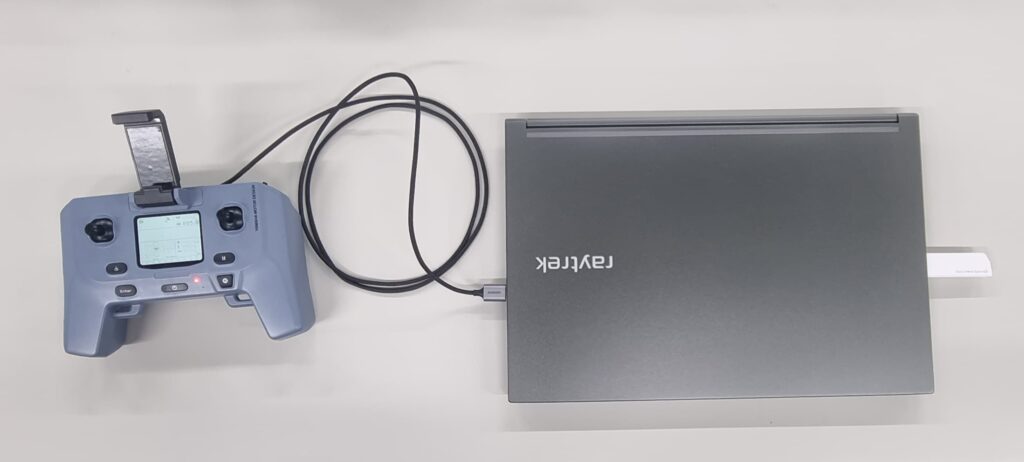
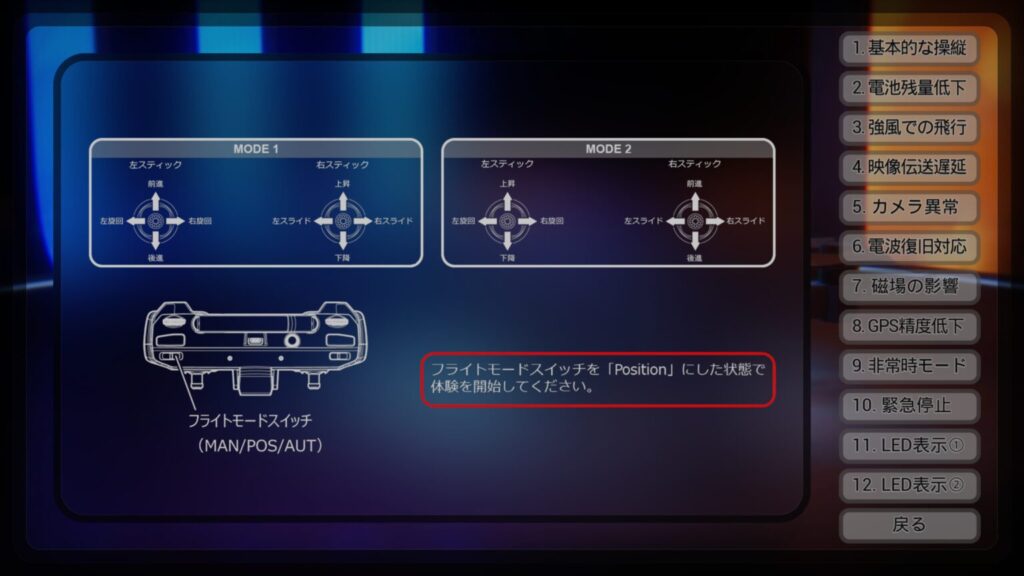
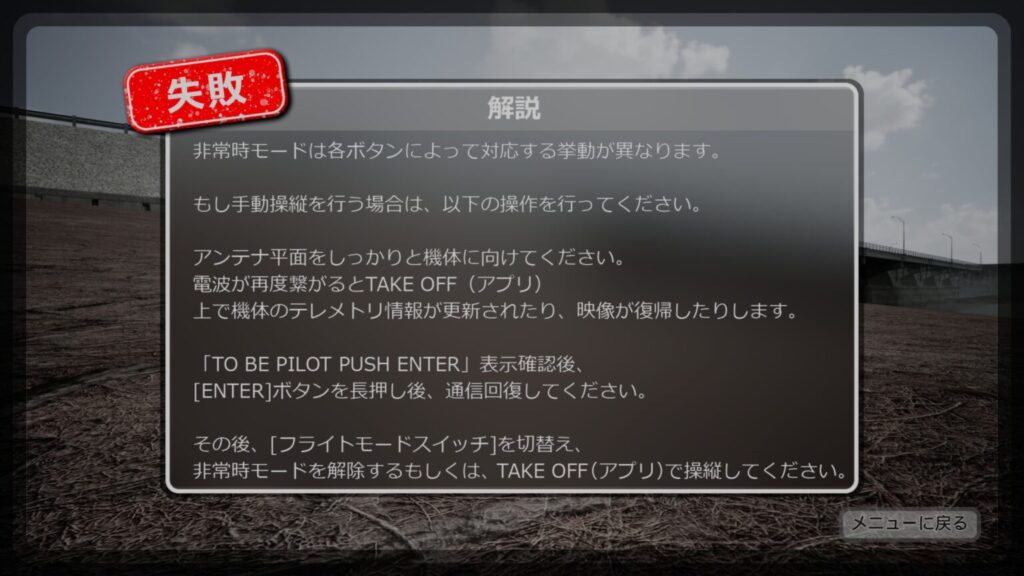
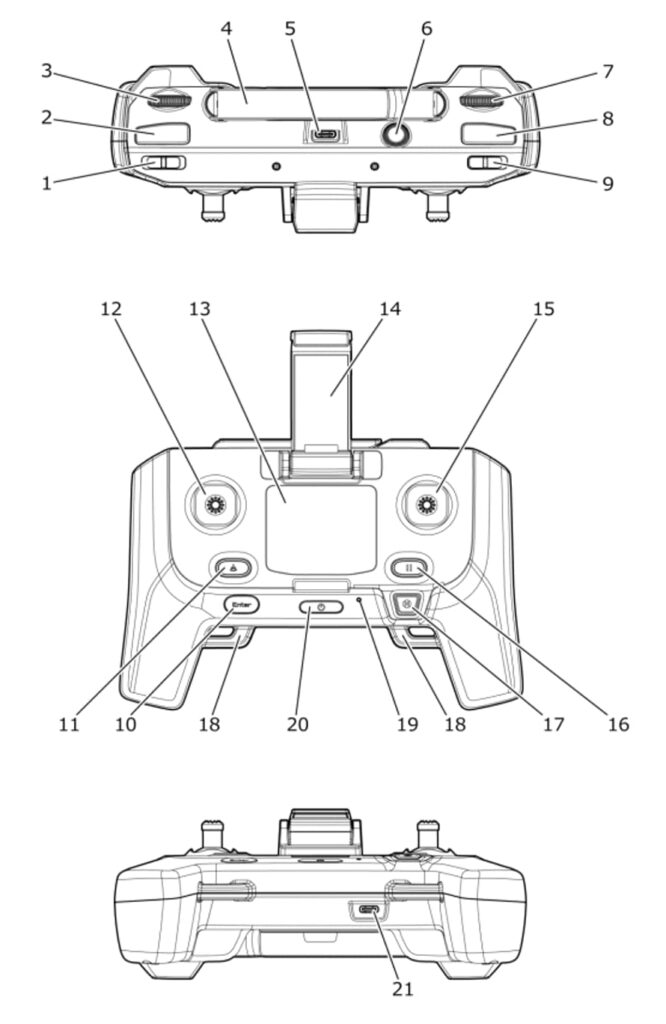
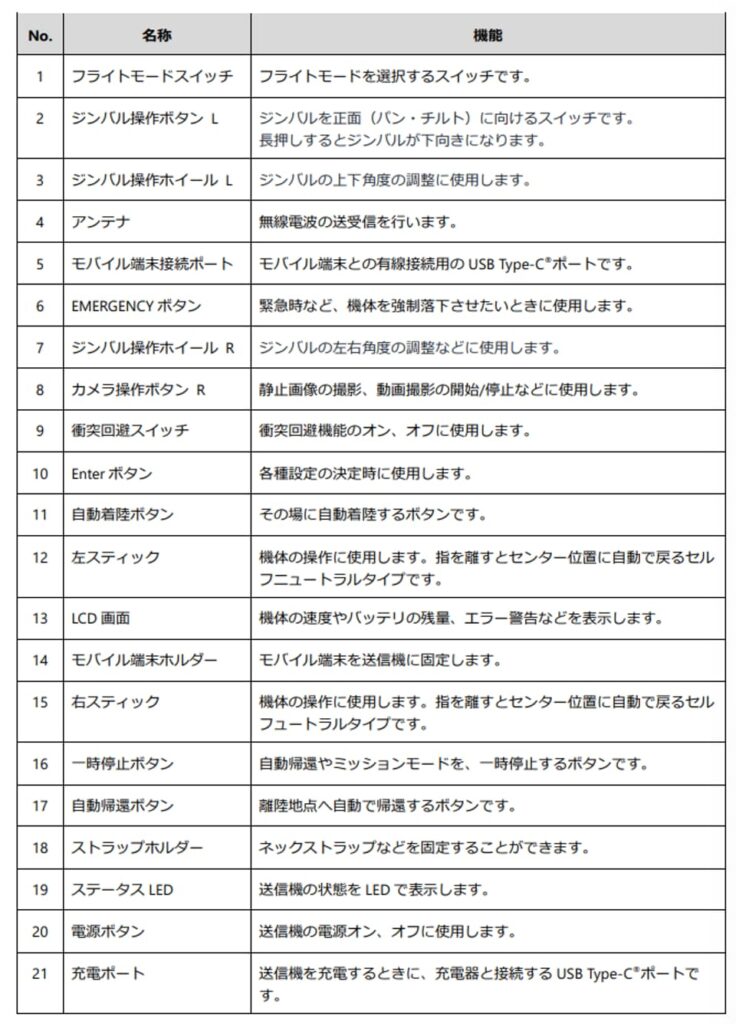
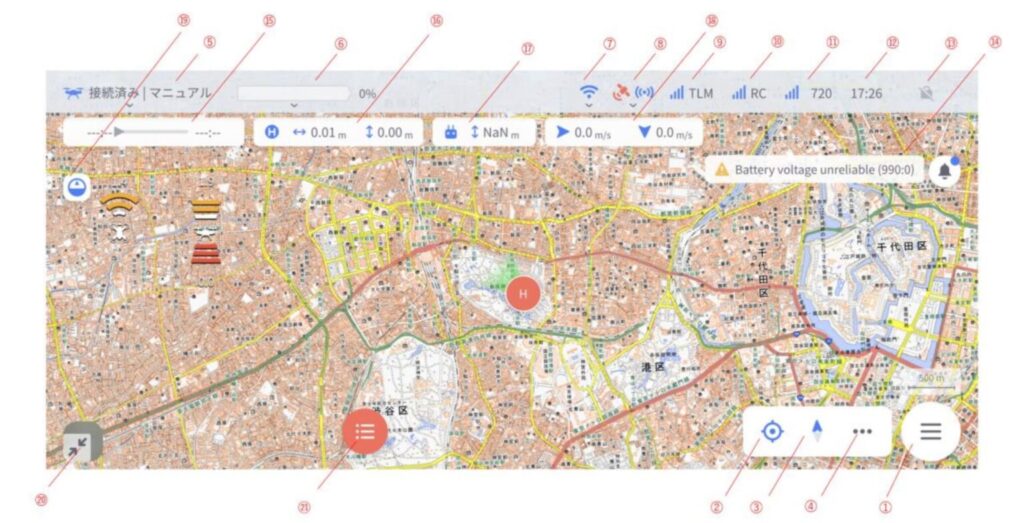
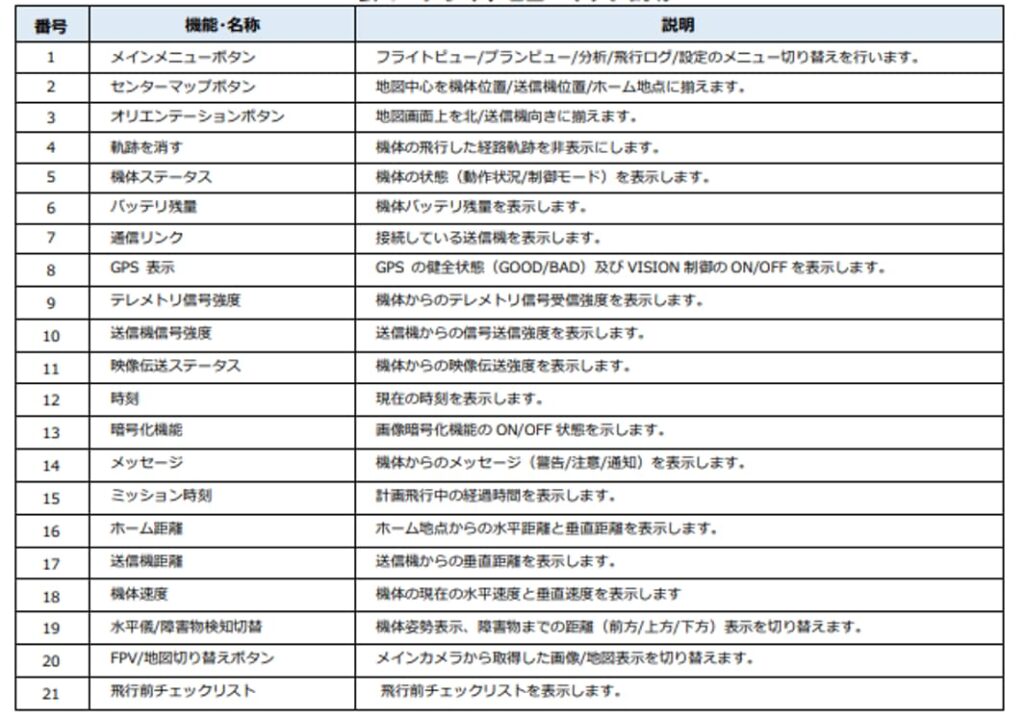
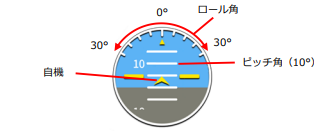
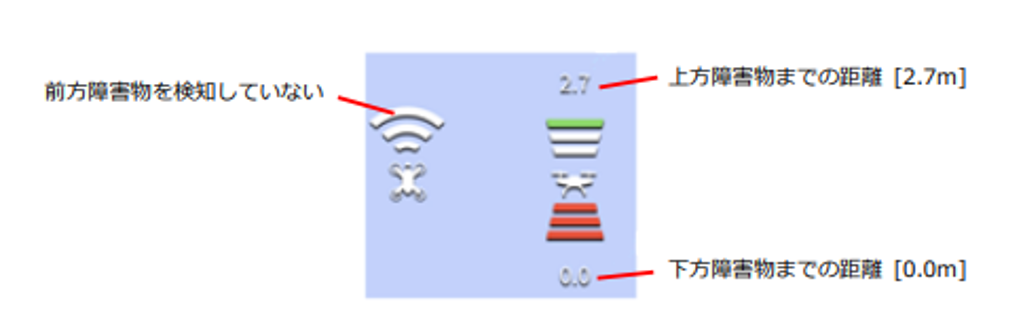
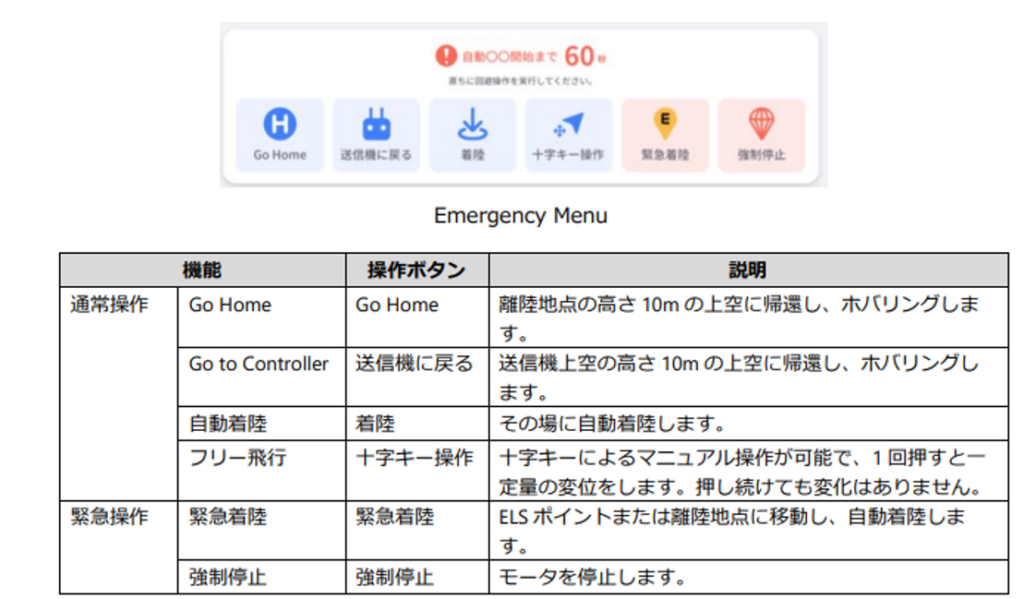
取扱説明書 SOTENバーチャルトレーナー 取扱説明書 SOTENバーチャルトレーナーとは ■体験の概要 SOTENの操縦方法を学習することのできるシミュレータです。操縦方法やトラブル時の対応方法をバーチャル空間で学習することができます。 ■機材使用環境 直射日光を受ける環境での使用は機器の破損に繋がりますので、利用しないでください。 機材のセットアップ ■必要機材の確認 体験開始前に以下の機材が揃っていることを確認してください。・PC本体×1 ・プロポ型シミュレータ専用コントローラ×1・Type-Cケーブル ×1・USBメモリ ×1※プロポは充電式になります。下部のUSBポートから充電してください。※USBメモリにデータが入っており紛失した場合は使用できなくなります。またコピーガード処理が施してあるため、データの書き込みや削除は不可です。 ■起動方法 1. PCとコントローラをType-Cケーブルで接続します。2. USBメモリをPCに差し込みます。3. PCを電源とつないだ状態で起動し、デスクトップ画面まで進みます。4.コントローラの電源を入れます。この時、コントローラ側のLEDがオレンジ色に点灯します。 5.USBメモリが自動的に起動します。実行ファイルの画面が表示されない場合、USBメモリから”USB Start”を押してください。6.USBメモリ内のアプリから、”SOTEN TRAINER”を選択します。7.シミュレータ画面が表示されます。8.コントローラが正常に接続されている場合は、コントローラのLEDが緑色に点灯します。 9.体験終了時はESCキーを押してアプリを終了してください。必ずPC電源を落としてからすべての機器を外してください。10.コントローラの電源を長押しして電源をオフにします。機材セットアップにおける注意点PCの電源ケーブルをコンセントに接続しない場合、パフォーマンスの制限が掛かり正常に動作しなくなるため電源は必ず接続するようにしてください。 操作方法 ■メニュー画面 体験モードは2種類あります。フリーフライト…空間内を自由に飛行できるモードです。シナリオ…特定の状況下での機体挙動や正しい判断を学習するモードです。 シナリオモードの選択方法体験したいシナリオを選択します。説明内容に従って操縦を行ってください。 シナリオモードの結果表示正しい手順で操縦できた場合に成功、不適切な手順であった場合に失敗、の判定が表示されるシナリオもあります。 ■体験中の操作 ドローンの起動スペースキーを押すまたはarmを行うことでドローンが起動します。armの方法モードによって異なります。詳しくは下記の図を参照ください。 ドローンの起動スペースキーを押すまたはarmを行うことでドローンが起動します。Cキードローン目線(FPV)と目視視点を切り替えます。Eキー任意の場所で非常時モードを発生させます。 ■基本操縦方法 基本的なコントローラのボタン配置は実機と同様です。 ■画面表示内容 ※カメラ及び動画ボタンを使用して実際に画像及び動画を保存することはできません。 ▶︎SOTEN取扱説明書はこちら※外部サイトに遷移します ■衝突回避と水平儀 水平儀と障害物レーダーはクリックする度に表示が入れ替わります。 ■非常時モードでの操作 PC画面上のアイコンをクリックすることで選択可能です。 ■STM練習モードについて 標準性能試験法(Standard Test Method for performance, STM)は実際の災害現場でロボット・ドローンが必要とする共通基盤性能を,繰り返し可能(repeatable)、再現可能(reproducible)、低価格(inexpensive) で定量的(quantitative) に評価できることを目指しており、本シミュレータではその要素を体験できるようになっている。技術協力:NPO国際レスキューシステム研究機構(参考資料はこちら)▶︎ATM 参考リンク※外部リンクへ移行します